| Developed at Lawrence Livermore National Laboratory (LLNL), ROSE is an open-source compiler infrastructure to build source-to-source program transformation and analysis tools for large-scale C (up to C23), C++ (up to C++17), UPC, OpenMP, Cuda, Fortran (77, 95, 2003), Java (7), Ada (95), and Binary applications. ROSE is used by a diverse range of users, from experienced compiler researchers to library and tool developers with minimal compiler expertise. ROSE is particularly well suited for building custom tools for static analysis, program optimization, arbitrary program transformation, domain-specific optimizations, complex loop optimizations, performance analysis, and cyber-security. | 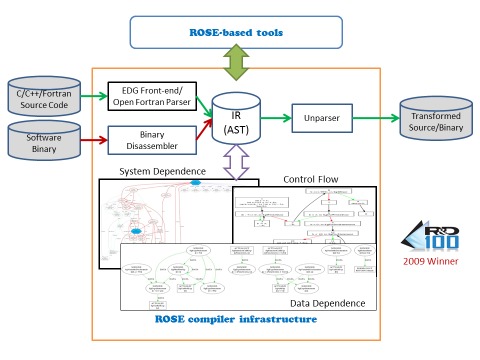
|
Goal of this document
This page is deliberately kept minimal to simplify maintenance. Only ROSE version-specific information is included here.
User-oriented ROSE API documentation can also be found at the ROSE Programming Manual.
All other documentations of ROSE can be found at github ROSE wiki.
ROSE can now be explored using DeepWiki, which offers several features:
- AI-generated wiki pages documenting the ROSE code base
- Visual diagrams of the ROSE architecture and components
- Interactive question-answering system for any code base inquiries
The documentation you're currently viewing may be for a specific version of ROSE. Documentation for the lastest releases can be found at http://doxygen.rosecompiler.org.